
Star Delta Starter
This is means of reducing starting current of induction motor by initially connecting to the stator winding to ‘STAR’.
Once the motor comes up to speed (68%) to be connected in DELTA.
When motor start in ‘STAR’ it has the effect of:
- Reducing the voltage per phase to 57.7% of the line voltage
- Starting current and torque are only 1/3rdof what they would be DOL starting. i.e. the received starting current is about 30% of the starting current during DOL start and the starting torque is reduced is reduced about 25% of the torque available at a DOL start.
This starting method works only when the application is light loaded during the start. If motor is too heavily loaded, there will not be enough torque to accelerate the motor up to speed before switching over to the delta position.
When starting the motor, the load torque is low at the beginning of the start and increases with the square of the speed.
When reaches approximately 80-85%of the motor rated speed the load torque is equal to the motor torque and the acceleration ceases. To get the rated speed a switch over to delta position is necessary.
Automatic switching to the delta running condition is preferred to manual changeover.
In ‘DELTA’ running Condition:
Phase voltage is equal to line voltage i.e. VL=Vph and motor behave on straight forward squirrel cage type.
Motor Starting Characteristics:
- Available starting current 33% full load current.
- Peak Starting current 1.3 to 2.6 full load current.
- Peak starting torque 33% full load torque.
Advantages of Star-Delta Starter
- The working of the star-delta method is simple and rugged.
- Star-Delta starter are generally economical compared to other reduced voltage method.
- Good torque/current performance.
- It draws 2 times starting current of the full load ampere of the motor connected.
Disadvantages of Star-Delta Starter
- Low Starting torque.
- Break in supply position transients.
- Six terminal motor required(Delta Connected)
- It requires 2 set of cables from starter to motor.
- It provides only 33% starting torque and if load connected to motor require higher starting torque than very heavy transients and stresses are produced. While changing from star to delta connections (mechanical breakdown may occur)
- High transmission and current peaks.
- Application having load torque higher than 50% of the motor rated torque will not start using the star-delta starter.
- Low starting torque.
- The transformation from star to delta generally happens once required speed is achieved, but is sometimes performed as low as 50% of nominal speed which make transient spark.
Control circuit of star-delta starter
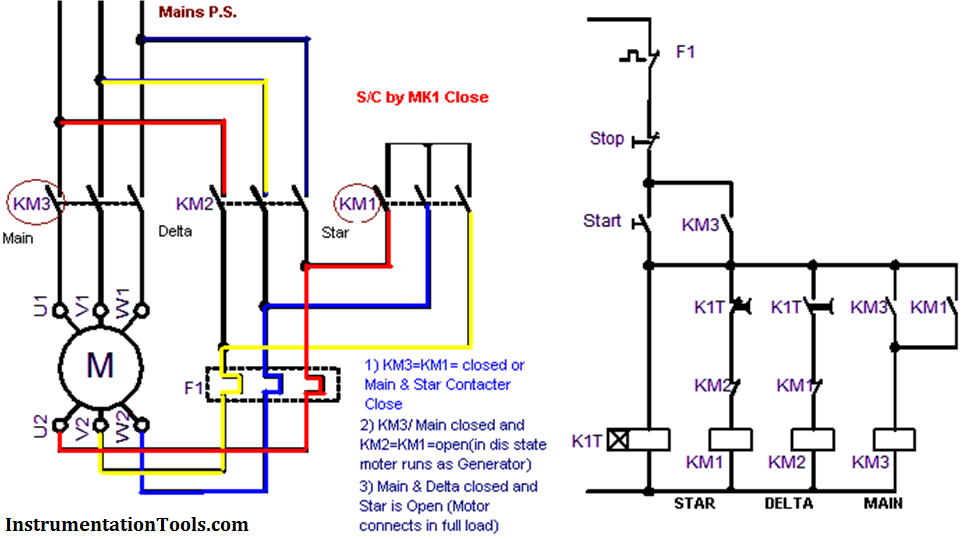
- The ON push button starts the circuits by initially energizing star contactor coil(KM1) of star circuit and timer coil(KT) circuit when star contactor coil(KM1) energized, then star main and auxiliary contactor change its position from NO to NC.
- When star auxiliary contactor(1) became NO to NC then its complete the circuit of main contactor coil(KM3) so main contactor coil energized and main contactor’s main and auxiliary contactor change its position from NO to NC. This sequence happens in fraction of time.
- After pushing the ON push button switch, the auxiliary contact of the main contactor coil(2) which is connected in parallel across the ON push button will became NO to NC , thereby providing a patch to hold the main contactor coil activated which eventually maintains the control circuit active even after releasing the ON push button switch.
- When star main contactor(KM1) closed its connect motor connects on STAR and its connected in STAR until time delay auxiliary contact KT (3) become NC to NO.
- Once the time delay is reached its set Time, the timer’s auxiliary contacts (KT)(3) in Star Coil circuit will change its position from NC to NO and at the Same Time the Auxiliary contactor (KT) in Delta Coil Circuit(4) change its Position from NO To NC so Delta coil energized and Delta Main Contactor becomes NO To NC. Now Motor terminal connection changes from star to delta connection.
Direct On line(DOL) Starter
- DOL starting is one of the most commonly method used for starting.
- Stator winding of induction motor are connected directly to its 3phase supply.
- Initially a very large current (5-8 times) full load current flows.
- This surge current reduces as the motor accelerate up to its running speed. This staring current will not cause damage to the motor unless the motor is repeatedly started and stopped in a short space of time. This is called ‘fast cycling’.
- Closing coil is energized from low voltage d.c. control circuit closing the isolation switch make main power available to the main contacts via transformer and rectifier to the operating circuit.
- When start button is pressed, closing coil energizes and release of start button will not interrupt the closing coil circuit because continuity maintained through retaining contact (S).
- Overload protection, phase imbalance and phase failure protection is by safety trip such as three pole terminal over current relay. Protection against short circuit by providing fuses on circuit breaker on the supply side of the starter.
- Motor Starting Characteristics
- Available starting current – 100%
- Peak Starting Current – 6 to 8 full load current
- Peak starting torque -100%
Advantages of DOL Starter
- Most economical and cheapest starter.
- Simple to establish, operate and maintain.
- Simple control circuitry.
- Easy to understand and trouble-shoot.
- It provides 100% torque at the time of starting.
- Only one set of cable is required from starter to motor.
- Motor is connected in delta at motor terminals.
Disadvantages of DOL Starter
- It does not decrease the starting current of the motor.
- High starting current (typically 6 to 8 times full load current of the motor)
- Mechanically Harsh (Thermal stress on the motor, thereby reducing its life)
- Voltage dip – There is big voltage dip in the electrical installation because of high in-rush current affecting other equipment.
- High Starting Torque – Un-necessary high starting torque, even when not required by load, thereby increased mechanical stress on the mechanical system (Stator shaft, bearings, coupling, connected equipments etc.)
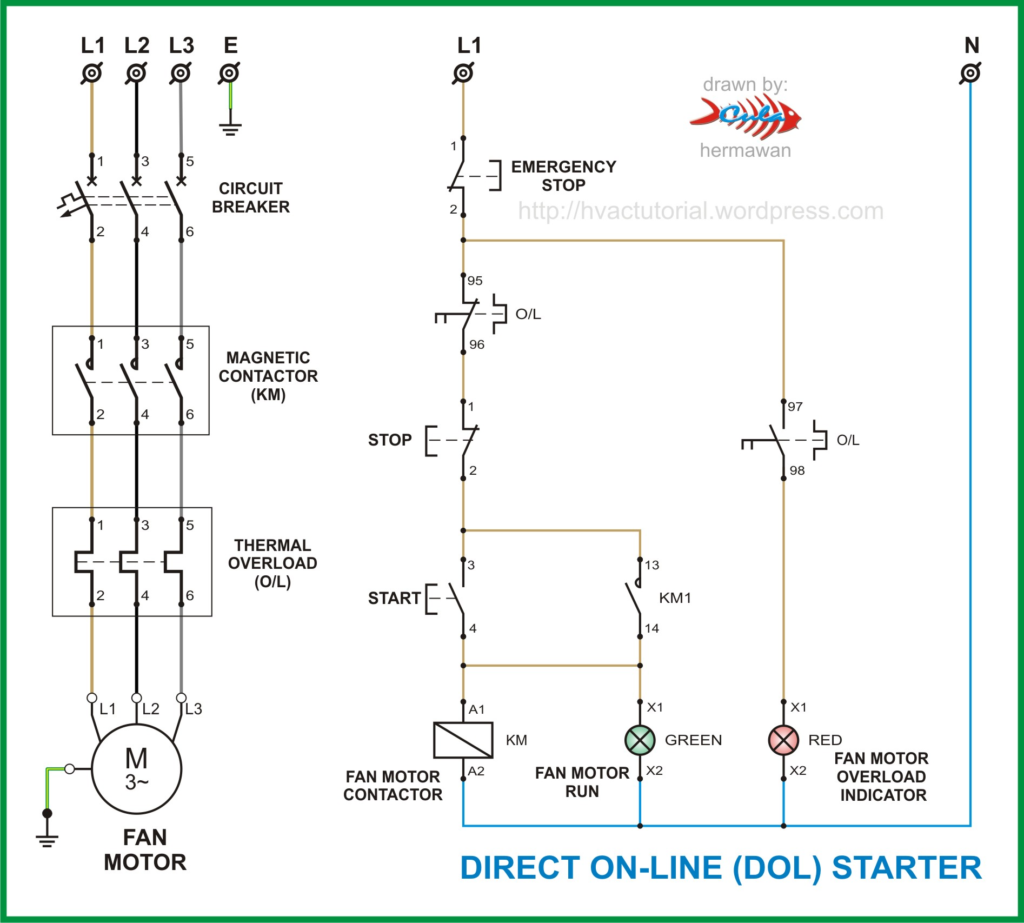
Control Circuit Diagram of DOL starter
Autotransformer Starting
- The transformer used in this starter is not the usual type of transformer with separate primary and secondary windings. It is an auto transformer which uses only one winding for both I/P and O/P.
- It reduces the initial voltage supplied to the motor is to step it down. When the motor has accelerated up to almost full speed, the reduced voltage is replaced by full main voltage.
- For staring, the 3phase supply is connected across the transformer and the motor receives a reduced voltage from the secondary tap. Reduced voltage gives lower current flow in the stator at starting and less torque. When speed builds up, the switches are changed over to cut out the transformer and apply full mains voltage to the motor.
- This type of transformer is used only in limited number of application because of the risk that a fault could cause primary voltage to be applied to the secondary load. One such use is in auto transformer starter for squirrel cage motors.
- Primary voltage of 440v applied across a single coil can be tapped at some point along its length and at the end to give a secondary voltage with a value in proportional to the position of the tap.
Control Circuit Diagram
Advantages of Autotransformer Starter
- For control over the power output to the motor by determining the initial voltage and initial current.
- Taps are typically set to either 50%, 65% or 80% or full voltage, which will also reduce the current.
- It can supply more current to the motor than other types of soft starter while keeping the voltage low at the same time. The transformer is utilized to step up the current.
Disadvantages of Autotransformer
- A reduced voltage start does not have consistent acceleration because of the difference in torque from the start period to the transmission period.
- A reduced voltage start also offers less flexibility in terms of starting voltage than solid state starters.
- It can’t accommodate changing loads and does not provide a soft stop.
- The compensating switch is much expensive than a star delta starter.
Soft Starter
A motor can be started in 3 ways
- Applying full load voltage at intervals of time: DOL starting
- Applied reduced voltage gradually: Star Delta starter and soft starter.
- Applying part winding starting: Autotransformer starter.
A soft starter falls under the 2nd method, where the motor terminal voltage is gradually increased with either electrochemically or by using HFSR (Harmonics free series reactor) method.
It can be any control system that decreases the torque by temporarily decreasing the voltage or current input, or device that temporarily alters how the motor is connected in the electric circuit.
It normally consists of solid state devices like thyristors to control the application of supply voltage to the motor. The starter works on the principle that the torque is proportional to the square of the starting current which in turn is proportional to the applied voltage. Thus the torque and the current can be adjusted by decreasing the voltage at the time of starting the motor.
It consists of two main components
- Power switches like SCRs which required to be phase controlled such that they are applied for each part of the cycle.
- Control logic using PID controller or microcontroller or any other logic to control the application of gate voltage to the SCR.
Advantages of Soft Starter
- Improved efficiency: The efficiency of soft starter system using solid state switches is more causing to the low on state voltage. (Energy manager control)
- Controlled Startup: The starting current can be controlled by easily altering the starting voltage and this ensure smooth starting of the motor without any jerks.
- Controlled acceleration: Motor acceleration is controlled smoothly.
- Low cost and size: This is achieved with the use of solid state switches.
- Has no contact surfaces, so no change of wear and tear and mechanical damage.
- Handle large current and large voltages.
- Electrical losses in the stator and feed cable are reduced.
- This produces a significant reduction in KVAr and KVA as well as useful reduction in KW.
- Enhancement of motor starting duty by reducing the temp rise in stator windings and supply transformer.
- The power factor improvement is self monitoring in built feature.
Disadvantages of Soft Starter
- Costly
- Ambient temperature to be maintained
- Difficult to repair onboard.
Difference between Soft Starter and Star-Delta Starter
- A star delta starter brings the motor up to normal running speed in two steps. A soft starter bring the motor up to speed in multiple steps that can be programmed into the starter.
- Soft starter have a option of a bypass contactor in the circuit so that when the motor comes up to operating speed the bypass contactor pulls in and the soft starter is dropped out of the circuit.
- Soft starter is an electronic system when by means of thyristor the starting current can be kept under acceptable limits with reasonable pick up time. In this gradually increasing voltage is applied during starting.

 REQUIREMENTS")

{kind=link}